Двух одинаковых веток не существует, каждая имеет уникальные очертания, размер и фактуру; некоторые могут быть мокрыми, покрытыми мхом или побегами. И все же птицы могут приземлиться на любую из них. Инженеры Стэнфордского университета решили позаимствовать у птиц эту способность.
![]() Фото из открытых источников
Фото из открытых источников
«Нелегко имитировать то, как птицы летают и садятся. После миллионов лет эволюции они сделали взлет и посадку легким процессом, даже несмотря на всю сложность и разнообразие ветвей деревьев»,– Уильям Родерик, ведущий автор разработки.
Ученые наблюдали за попугаями в лабораторных условиях: птицы перемещались между насестами, и все их движения фиксировали камеры. Каждый из насестов имел свою величину и был выполнен из разных материалов – от наждачной бумаги до тефлона, и там стояли датчики, которые фиксировали силу, нужную птице в момент взлета и посадки.
![]() Фото из открытых источников
Фото из открытых источников
Оказалось, что птицы выполняли одни и те же воздушные маневры независимо от того, на какую поверхность они приземлялись. На текстуру реагировали только лапы, а в целом поведение птиц было стереотипным.
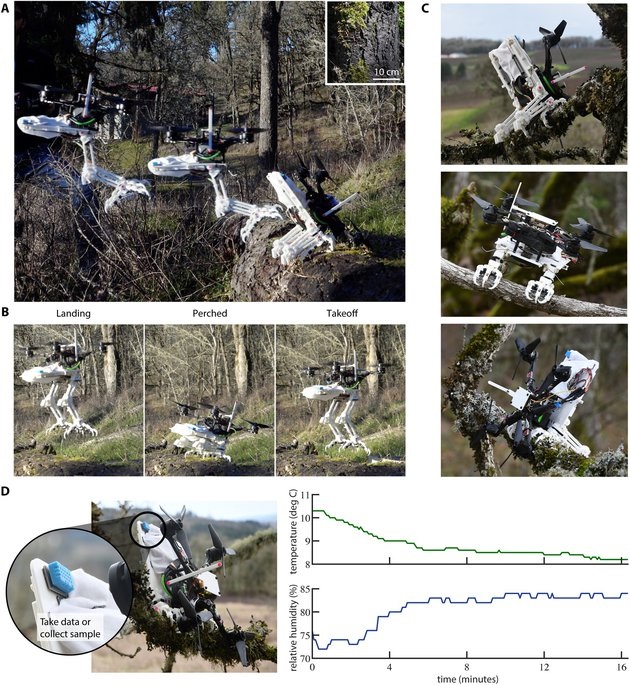
В результате был создан робот под названием SNAG (stereotyped nature-inspired aerial grasper, «стереотипный, вдохновленный природой воздушный захватчик»). Он представляет собой механизированные лапы, которые крепятся на любой поверхности, и площадку с дроном (вместо него сюда можно интегрировать любое другое устройство). Как и попугаи, SNAG демонстрирует «стереотипный набор движений», а его ноги созданы по аналогии с лапами сапсана. Кости напечатаны на 3D-принтере, а мышцы и сухожилия заменяют моторы и леска.
У каждой ноги есть собственный двигатель для движения вперед и назад, а еще один отвечает исключительно за захват. После того, как лапы обхватывают ветку, акселерометр сообщает, что робот приземлился, а потом запускается алгоритм балансировки для его стабилизации. Тестовые полеты провели в сельской местности штата Орегон; результат признан успешным.
Аппарат имеет широкую сферу применения, включая поисково-спасательные операции и мониторинг лесных пожаров. Он уже помог больше узнать об анатомии птиц. В частности, эксперименты с расположением пальцев показали, что оно не влияет на способности птиц к приземлению.
Для Уильяма Родерика, который вырос в семье биологов, одно из наиболее интересных направлений – исследование окружающей среды. К роботизированной птице уже прикреплялся датчик температуры и влажности, что позволило собрать данные о микроклимате в Орегоне.
Эта же команда ученых ранее разработала робота, умеющего летать как голубь.